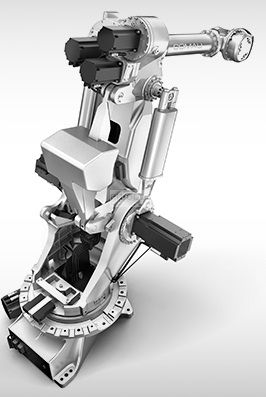
Roboter mit 6-Achs-Design mit einer Reichweite von 2703 mm und einer Tragfähigkeit von 650 kg. Dies ist ein leistungsstarkes Modell, das Energieeinsparungen, Kostenreduzierung und höhere Produktivität mit der Schutzart IP65 am Handgelenk und der Installation auf dem Boden garantiert.
C5G-Controller.
Die C5G-Steuerung verwendet die neueste Generation des Industrie-PCs APC820 mit Core2 Duo Technologie-CPU, die in der Lage ist, hohe Leistungen bei geringem Energieverbrauch zu erreichen
Energie sparen
• Geringster Verbrauch im Standby-Modus, geringer Verbrauch während des Betriebs • Kühlsystem proportional zum Betrieb der Steuereinheit
• Energierückgewinnungssystem mit einem Programm mit hohem dynamischen Inhalt
Flexibilität und Zuverlässigkeit
Die neue Generation von Feldbussen auf Basis der Hilscher-Technologie, integriert von B & R in ihre Remote I / O X20-Familie, garantiert eine exible und zuverlässige Schnittstelle in jeder Kundenanwendung. Modulare Schnittstellen sind verfügbar, wie digitale E / A, analoge E / A und für viele Arten von Positionsgebern, Resolvern usw.
Sicherheit
Integriert in das SDM-Modul, TÜV-zerti fi ziert (Zweikanal-Not-Aus, Freigabe-Gerät, Logik-Freigabe), Entbremsfunktion am Roboterarm und Interlock-Funktion für die Mensch-Roboter-Kooperation
Modularität / Erweiterbarkeit
Modulares System für Antriebe bis zu 13 Achsen im Unterschrank Funktion der Leistung und das Robotermodell
Gleichzeitige Verwaltung mehrerer Roboter
Hardware-Architektur für die Verwaltung von bis zu 16 Achsen in "Multi-Arm" -Konfiguration mit Anwendungsbox
3D-Offline-Programmierung mit Robosim Pro
Multi-Anwendungsverwaltung
Möglichkeit, viele Anwendungen gleichzeitig zu verwalten
C5G open controller: um der eigentliche Antrieb der Roboterbewegung zu werden
Es ermöglicht die Entwicklung kundenspezifischer Bewegungsalgorithmen und spezieller Anwendungen unter Verwendung von Sensoren
Hauptsoftware-Funktionen verfügbar
• Automatische Nutzdatenidentifikation: automatische Identifizierung der Nutzlast zur Optimierung der Roboterbewegung
• Kollisionserkennung: Notstopp des Roboters im Falle einer Kollision, um den Mechaniker und die Ausrüstung zu schützen
• Kooperative und synchronisierte Bewegung: koordiniertes und simultanes Management mehrerer Roboter und Hilfsachsen (Linearspur, Servo-Pistole, Positionierer und andere Applikationsgeräte)
• Förderer und Sensor Tracking: Tracking von Teilen in Bewegung auf linearen und kreisförmigen Förderern. Genauigkeit bei der Verfolgung des Pfades durch Verwendung verschiedener Arten von externen Sensoren
• Gelenk-Soft-Servo-Technologie: Die Fähigkeit der einzelnen Robotergelenke, äußeren Kräften zu entsprechen, die für die spezifische Anwendung erforderlich sind
• Interferenzbereiche: Bereiche mit verschiedenen Formen können zur Begrenzung des Arbeitsbereichs des Roboters dynamisch definiert werden
• Absolute Genauigkeit des Roboters: Algorithmus zur Anpassung der tatsächlichen Kinematik an das offline programmierte theoretische Modell
Allgemeine technische Spezifikationen
- Maximale Belastung des Roboters: 650 kg
- Maximale Reichweite: 2703 mm
- Wiederholbarkeit in Position: 0,15 mm
- Controller: C5G
Roboterbewegungsgeschwindigkeit in º / s
- Achse 1: 75 ° / s
- Achse 2: 75º / s
- Achse 3: 75º / s
- Achse 4: 90º / s
- Achse 5: 90º / s
- Achse 6: 120º / s
Bewegungsbereich (Achse 1 bis 6)
- Achse 1: +/- 180 °
- Achse 2: -60 ° / + 75 °
- Achse 3: -231 ° / -10 °
- Achse 4: +/- 2700 °
- Achse 5: +/- 125 °
- Achse 6: +/- 2700 °
Anwendungen
- Gießerei
- Verpackung
- Handhabung
- Versammlung
- Maschinenneigung
- Messung
- Testen
- Bearbeitung
- Holz / Glasbearbeitung
- Plasmaschneiden / Wasserstrahl
- Punktschweißen
- Entgraten
- Polieren
- Abkantpressen der Presse
Anwendungen
Punktschweißen , Drücken Sie Tending , Be- und Entladen von Teilen , Bearbeitung , Handhabung von Teilen , Polieren , Messung , Montage von Teilen



{kind=link}
{kind=link}
{kind=link}