
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
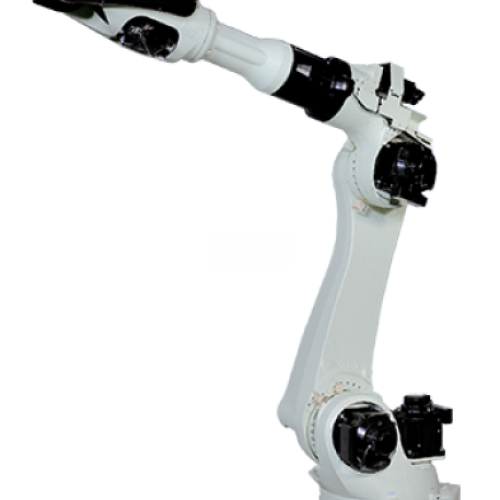
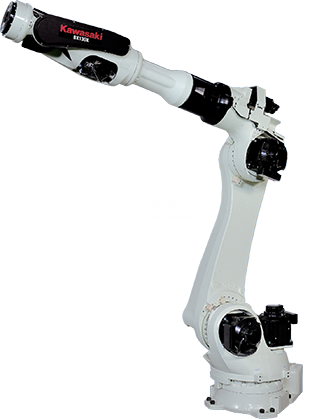
川崎BX130X
BX130X机器人采用功率强大的重型电机进行点焊,为运动控制提供了更高的速度优化,其紧凑的设计,薄的臂和宽的伸展距离,在安装时节省空间,便于安装在“高密度“提供更大的灵活性;制造和工程结构最大限度地减少了与其他机器人和外围设备的干扰,由于采用了Kawasaki技术,该机器人可以在高度污染的环境中工作,从而缩短了维护周期,从而实现了更高的生产优化效益。
E控制器
E控制器结构紧凑,性能可靠,性能卓越,CPU技术先进,可实现更高的生产力和轨迹控制。 Kawasaki AS技术支持广泛的工业应用,使用提供顺序控制的编程语言;为了完全控制16个轴,最多可以扩展10个外部轴。由于其模块化组件和有限的电缆,易于维护和诊断。
- 理想的每个地区的一次能源分配电压
- 更大的扩张能力
- 采用间接冷却系统的封闭结构
- 数字伺服系统
- I / O通道32(最大128)
主要规格
机器人的最大负载:130公斤
轴数:6
最大水平范围:2,991毫米
最大垂直范围:4,211毫米
重复性:±0.2毫米
控制器:E32
轴数:6
最大水平范围:2,991毫米
最大垂直范围:4,211毫米
重复性:±0.2毫米
控制器:E32
运动范围(°)
轴JT1:±160°
轴JT2:+ 76°/ -60°
轴JT3:+ 90°/ -75°
轴JT4:±210°
轴JT5:±125°
轴JT6:±210°
轴JT2:+ 76°/ -60°
轴JT3:+ 90°/ -75°
轴JT4:±210°
轴JT5:±125°
轴JT6:±210°
最大速度(°/ s)
轴JT1:105°/ s
轴JT2:90°/ s
轴JT3:130°/ s
轴JT4:200°/ s
轴JT5:160°/ s
轴JT6:300°/ s
轴JT2:90°/ s
轴JT3:130°/ s
轴JT4:200°/ s
轴JT5:160°/ s
轴JT6:300°/ s
机器人应用
携带点焊
基座点焊
物料搬运
摩擦点加入
机器抚育
物料搬运
材料去除
点焊
基座点焊
物料搬运
摩擦点加入
机器抚育
物料搬运
材料去除
点焊
{kind=link}