
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
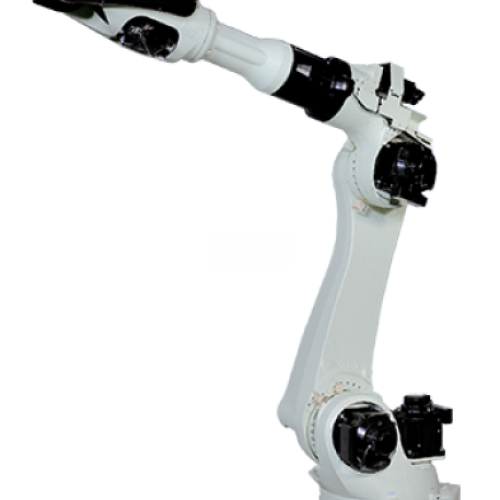
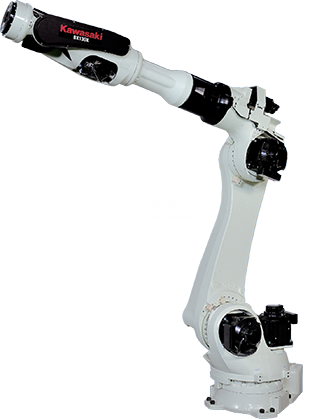
Kawasaki BX130X
Der Roboter BX130X ist für das Punktschweißen mit leistungsstarken Hochleistungsmotoren konzipiert und bietet eine Optimierung der Bewegungssteuerung für mehr Geschwindigkeit. Sein kompaktes Design und sein dünner Arm sowie die große Reichweite ermöglichen eine platzsparende Installation und vereinfachen die Installation in Anwendungen von hohe Dichte "bietet größere Flexibilität; Die Struktur der Fertigung und des Engineerings minimiert Interferenzen mit anderen Robotern und Peripheriegeräten. Dank der Kawasaki-Technologie kann dieser Roboter in stark verschmutzten Umgebungen eingesetzt werden. Dies ermöglicht kürzere Wartungsintervalle, die eine höhere Rentabilität bei der Produktionsoptimierung ermöglichen.
E Controller
Die E-Controller sind kompakt, zuverlässig und leistungsstark. Sie verfügen über eine fortschrittliche Technologie in der CPU, die eine höhere Produktivität und Trajektoriensteuerung ermöglicht. Eine breite Palette industrieller Anwendungen, die von der Kawasaki AS-Technologie unterstützt werden und eine Programmiersprache verwenden, die eine Sequenzsteuerung ermöglicht; mögliche Erweiterung von bis zu 10 externen Achsen zur vollständigen Steuerung von 16 Achsen. Einfache Wartung und Diagnose dank modularer Komponenten und begrenzter Kabel.
- Ideal für die primäre Energieverteilungsspannung jeder Region
- Größere Erweiterungsfähigkeit
- Geschlossene Struktur mit indirektem Kühlsystem
- Digitales Servosystem
- I / O-Kanäle 32 (max128)
Anzahl der Achsen: 6
Maximale horizontale Reichweite: 2.991 mm
Maximale vertikale Reichweite: 4.211 mm
Wiederholbarkeit: ± 0,2 mm
Controller: E32
Achse JT2: + 76 ° / -60 °
Achse JT3: + 90 ° / -75 °
Achse JT4: ± 210 °
Achse JT5: ± 125 °
Achse JT6: ± 210 °
Achse JT2: 90 ° / s
Achse JT3: 130 ° / s
Achse JT4: 200 ° / s
Achse JT5: 160 ° / s
Achse JT6: 300 ° / s
Sockel Punktschweißen
Materialhandhabung
Friction Spot Fügen
Maschinenbearbeitung
Materialhandhabung
Materialentfernung
Punktschweißen
Anwendungen
Punktschweißen , Handhabung von Teilen , Messung , Montage von Teilen
{kind=link}