
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
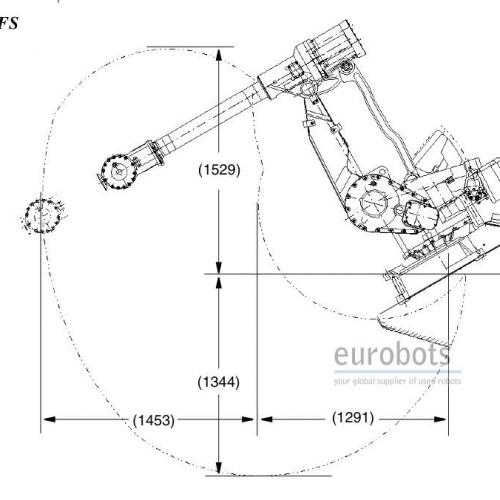
ABB IRB 4400FS30 M98A
Año 1999.versión estante brazo largo de la IRB4400 con 2.744 mm alcance brazo horizontal y 30 kg de carga útil. A diferencia de los robots de seis ejes convencionales, los robots de consola tienen su principal dotación de trabajo por debajo de los pies. Así, desde su posición elevada en la parte superior o al lado de la IMM, el IRB 4400 FS30 llega a más de 1 m por debajo de su pie, proporcionando un acceso rápido y fácil a la pieza de trabajo o a la matriz en la máquina. Alcance excepcional, complementado con una carga útil de 30 kg, hacen a los 4400 FS IRB especialmente adecuados para aplicaciones donde el espacio es mínimo, como a menudo se encuentran en aplicaciones de moldeo por inyección de plástico.
El IRB 4400FS es una alternativa atractiva para el robot de tres ejes, tradicionalmente utilizado para manejo IMM. La tecnología de seis ejes del robot ABB se hace superior en versatilidad, alcance y precisión - cualidades que ayudan a minimizar los tiempos de ciclo y optimizar la calidad del producto.
Además, el IRB 4400 puede realizar tareas de post-proceso en paralelo durante cada 'disparo', mientras que los robots de tres ejes convencionales permanecen inactivos debido a sus limitaciones de movimiento puramente lineales. Tareas posteriores a la de proceso pueden incluir la limpieza, el flamear, control de calidad, la perforación y montaje, permitiendo a los diseñadores de plantas para reducir el número de estaciones de aguas abajo y reducir los tiempos de producción de la planta.
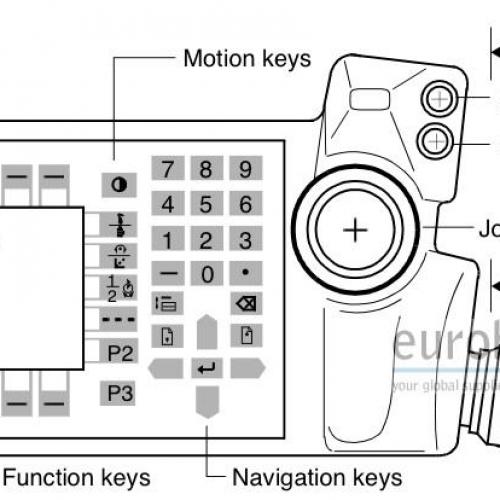
El controlador S4C permite instrucciones de RAPID que hacen más fácil la programación.
Datos Generales:
- Número de ejes: 6
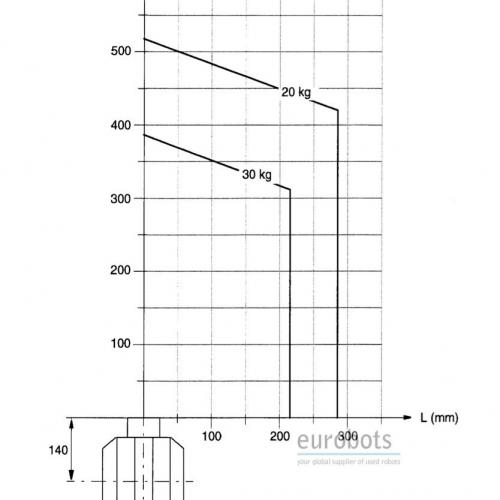
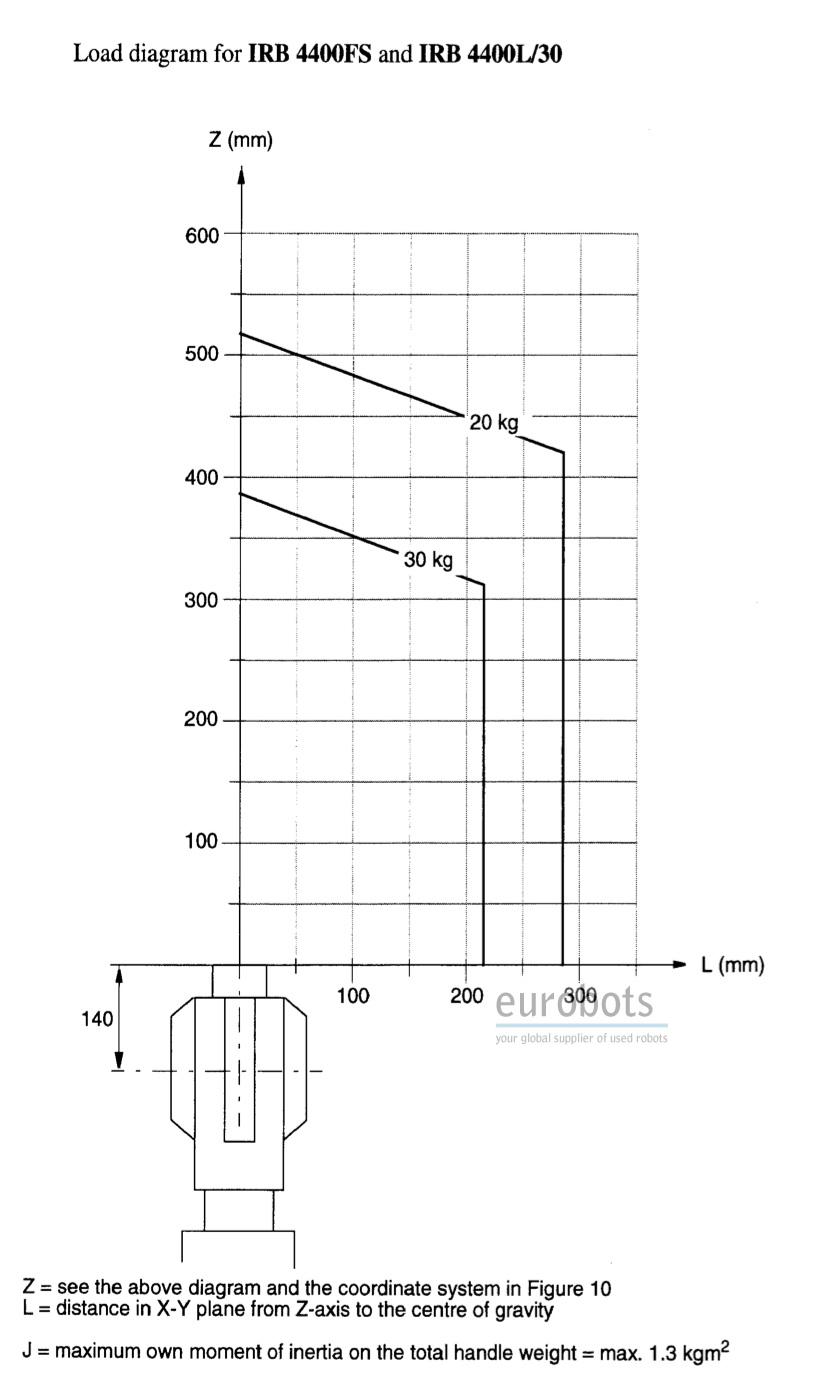
- Capacidad carga: 30 Kg.
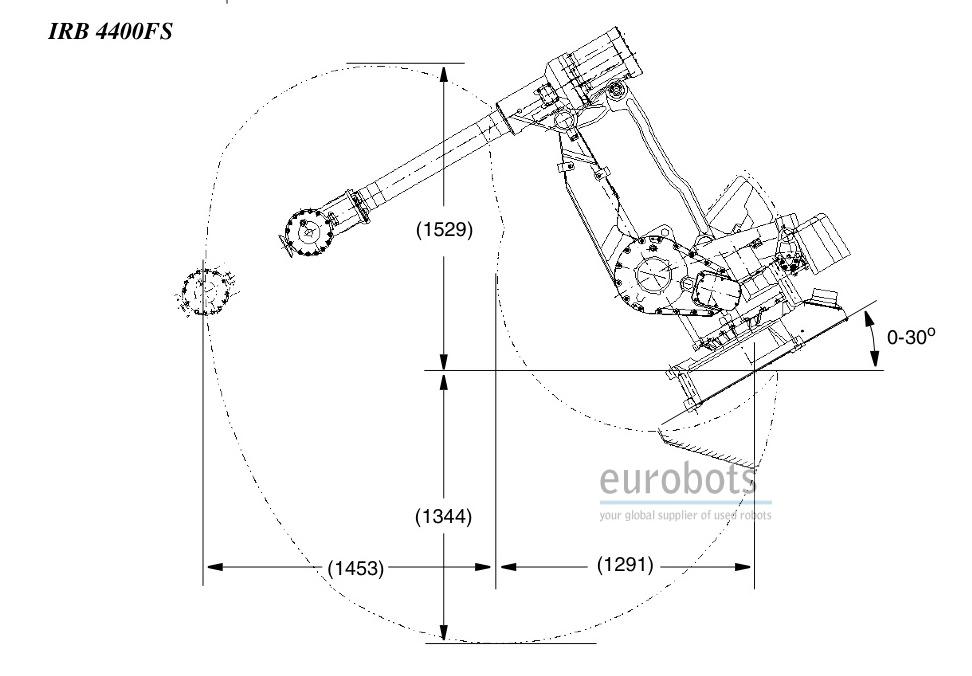
- Máximo alcance: 2744 mm.
- Precisión en la repetición: 0,1 mm.
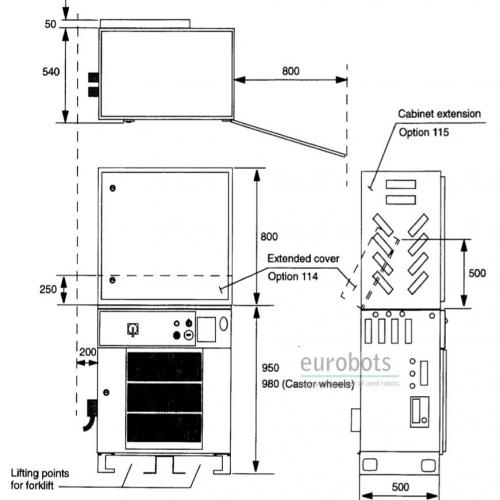
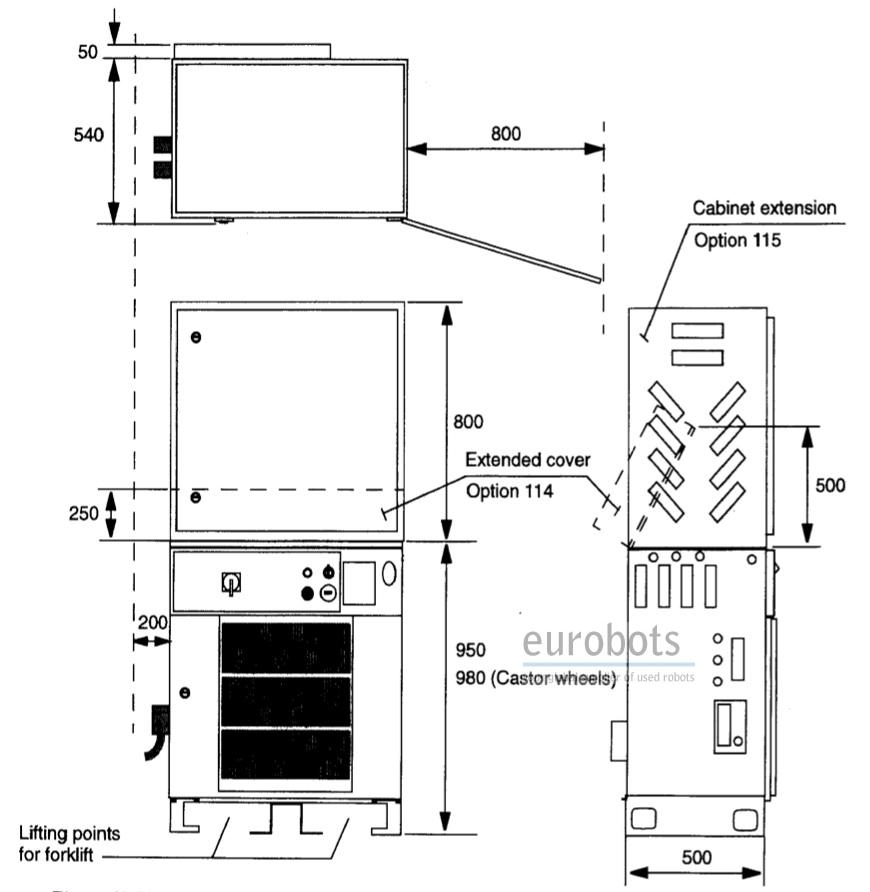
- Controlador: M98A S4C.
Velocidad y Movimiento del Robot:
- Eje 1: 150º/seg
- Eje 2: 120º/seg
- Eje 3: 120º/seg
- Eje 4: 225º/seg
- Eje 5: 250º/seg
- Eje 6: 330º/seg
Aplicaciones
Soldadura por arco , Paletización , Carga y descarga de piezas , Mecanizado , Manipulación de piezas , Montaje de piezas





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}