
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
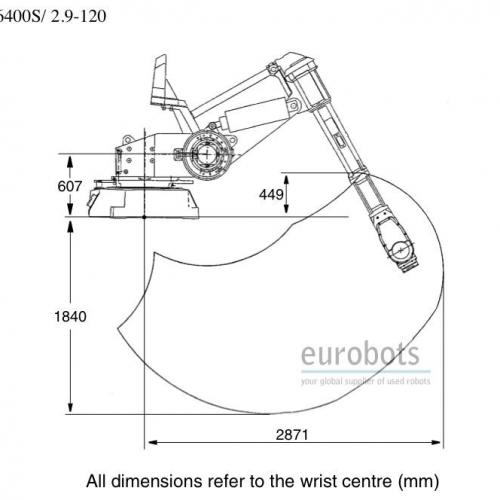
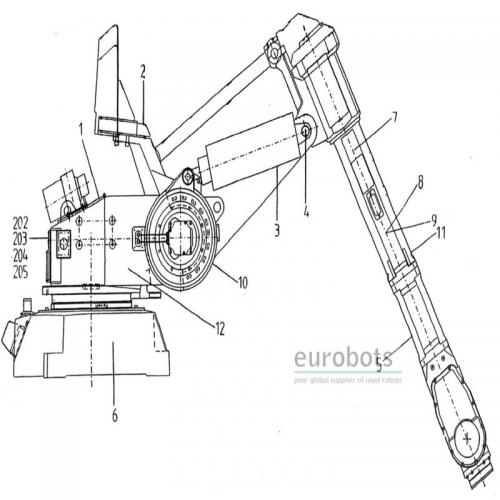
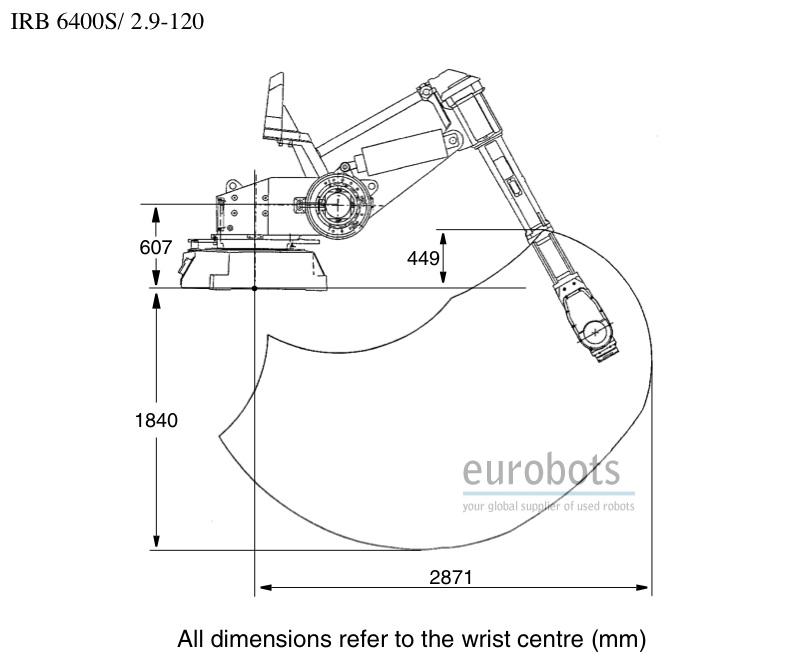
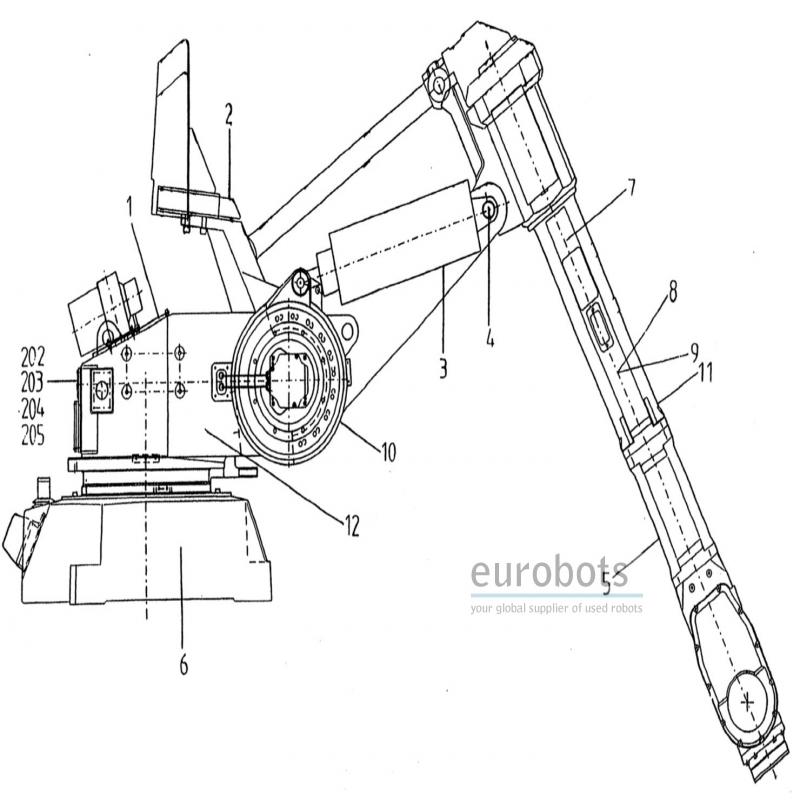
ABB IRB6400S Shelf
Año 2001. Edición útil del famoso 6400 equipado con el controlador S4CPlus moderno. Adecuado para prensa de transferencia y descarga de máquinas desde una posición elevada.
El IRB 6400 controlador de manipulador y S4Cplus robot de 6 ejes proporcionan tiempos de ciclo cortos y precisos, rápidos cambios de formato y consistentemente alta precisión del proceso.
La familia de los robots 6400 se compone de diferentes variantes de los brazos y las categorías de carga útil que son controlados por la función avanzada dinámica de control basada en el modelo QuickMove, asegurando siempre la máxima aceleración, precisión de la trayectoria y velocidad sobre todo el desarrollo del trabajo.
S4Cplus le da el control de movimiento superior. Cuenta con control basado en modelo dinámico, QuickMove para tiempos de ciclo cortos, y la función TrueMove para la ruta de alta precisión tras capacidad independiente de la velocidad del robot. La capacidad de configuración del sistema S4Cplus y el lenguaje de programación potente RAPID hacen que sea fácil de configurar el controlador para una amplia gama de aplicaciones. Dos canales Ethernet incorporadas proporcionan para facilitar el servicio y trabajo en red de fábrica. Hay bus de campo y canales serie para PLC y conexiones de PC. El controlador es compatible con TCP / IP, DNS y otros protocolos. Un protocolo robot dedicado, RAP, está disponible para su control y seguimiento.
Datos Generales:
- Número de ejes: 6
- Capacidad carga: 120Kg.
- Máximo alcance: 2900 mm.
- Precisión en la repetición: 0,15 mm.
- Controlador: M2000 S4CPlus.
Velocidad y Movimiento del Robot:
- Eje 1: 100º/seg
- Eje 2: 100º/seg
- Eje 3: 100º/seg
- Eje 4: 210º/seg
- Eje 5: 150º/seg
- Eje 6: 210º/seg
Aplicaciones del Robot:
- Soldadura por puntos
- Transfer entre prensas
- Manipulación de partes
- Manipulación entre máquinas
- Paletización
- Ensamblaje
Aplicaciones
Soldadura de punto , Presione tendiendo , Paletización , Carga y descarga de piezas , Mecanizado , Manipulación de piezas




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}