
 English
English
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
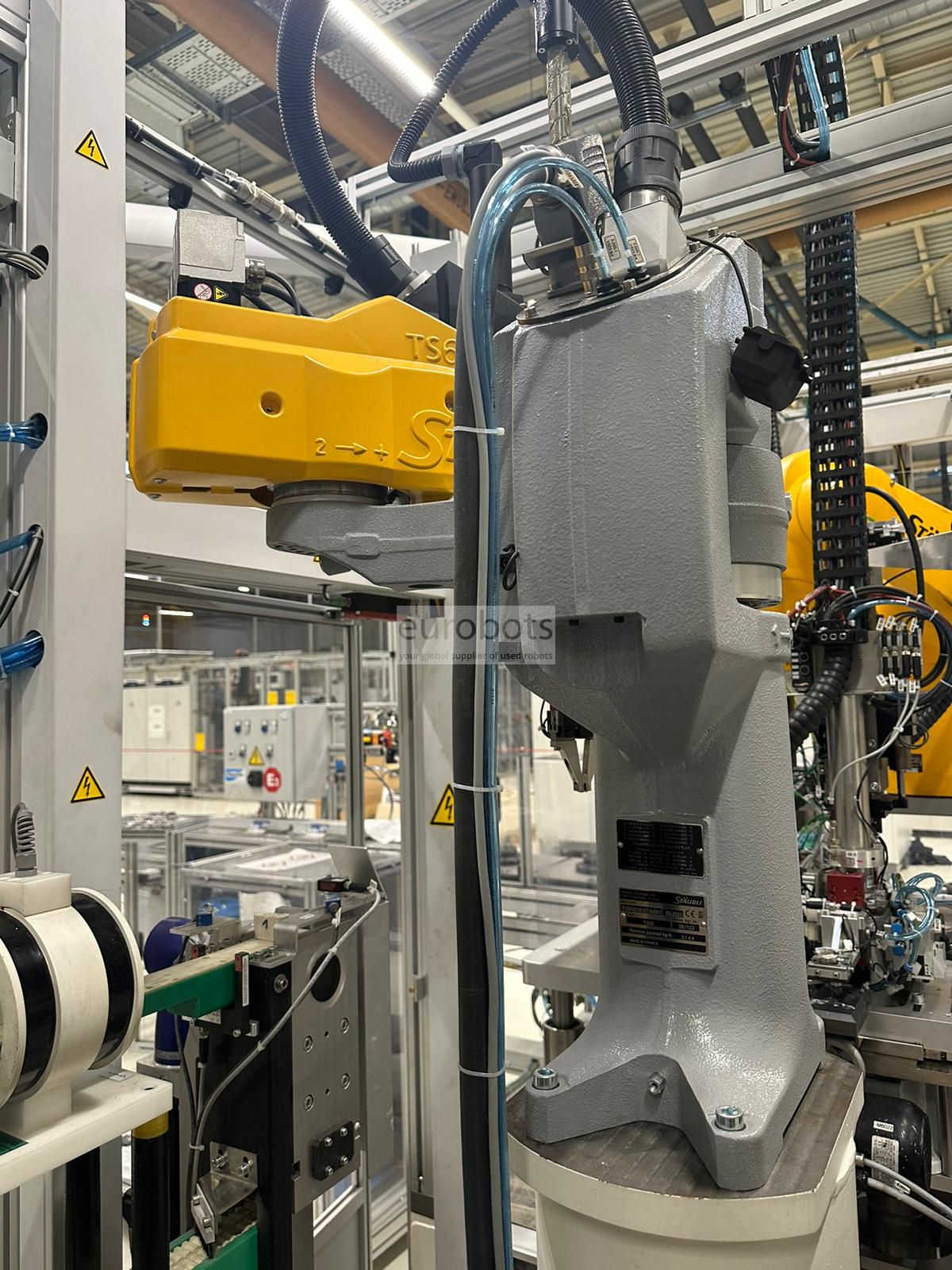
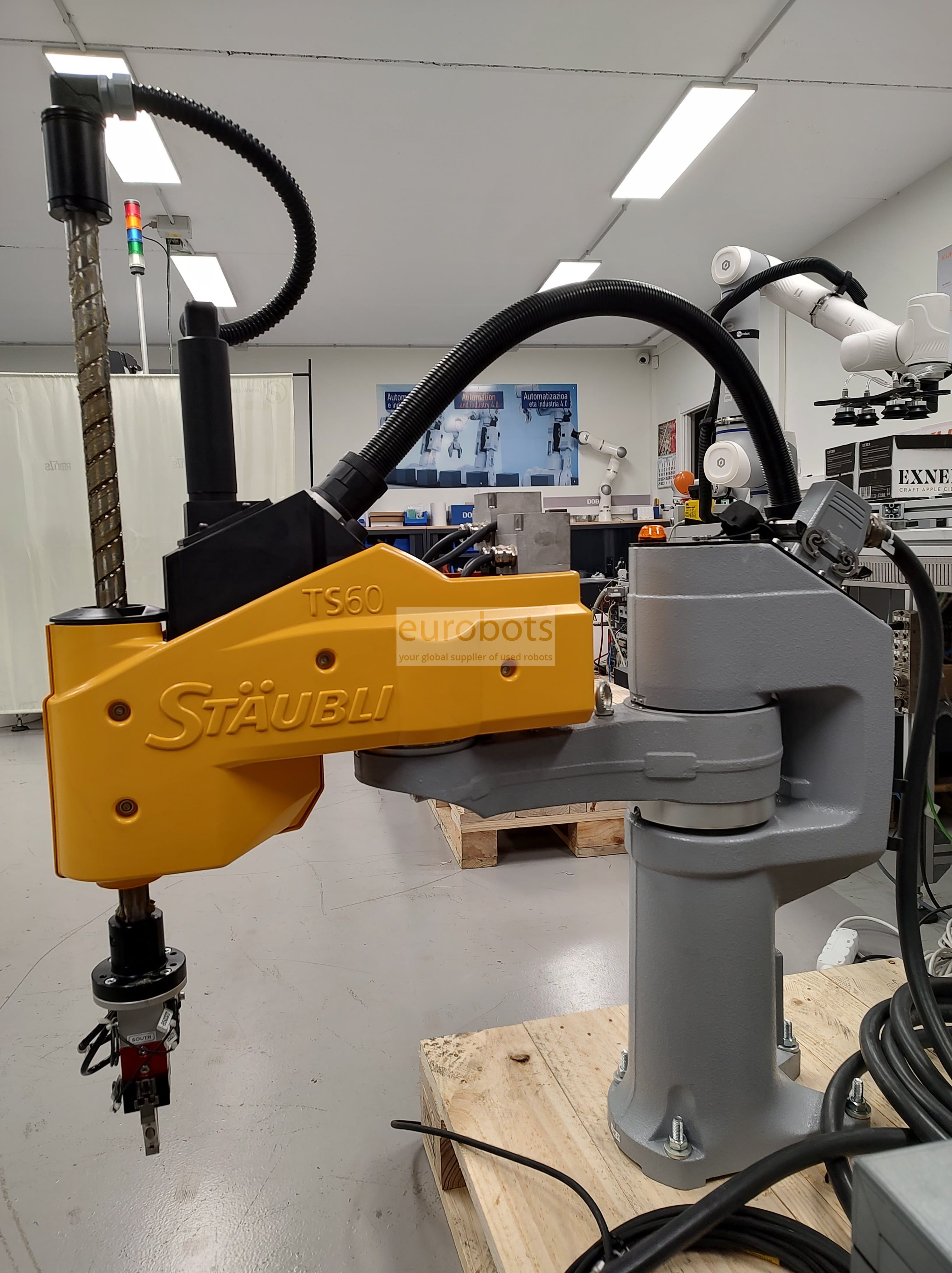
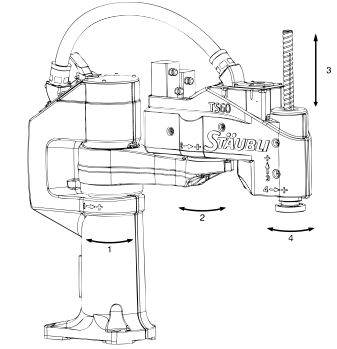
Robots Scara Staubli TS60 Scara controlador CS8C
El Staubli TS60 es un robot de cuatro ejes, de alta velocidad y de carga útil, que cuenta con características únicas y beneficios diseñados para optimizar la eficiencia y la productividad en todos los entornos, lo que resulta en una alta calidad consistente en tándem con un aumento dramático del rendimiento. Extremadamente rápido, capacidad de hasta 100 capturas por minuto (ppm) con tiempo de inactividad cero. Las opciones de montaje en el suelo o en la pared ofrecen mayor adaptabilidad y flexibilidad en la integración del robot.
Las conexiones eléctrica, neumática y de entrada / salida están disponibles tanto en el antebrazo como en la brida de la herramienta.
Equipado con el potente controlador CS8C (versión compacta) que cuenta con:
- Ethernet, bus de campo, entradas / salidas digitales, conexiones serie
- Arquitectura abierta
- Fácil de instalar en cualquier lugar
- IP20
- Versión de bastidor de 19 pulgadas
- Compacidad
- Todas las conexiones en el panel frontal
- Accesibilidad
- Tecnología 100% digital
- Confiabilidad
- Dimensiones: H x L x P: 331 x 445 x 455 mm
- Clase de protección: IP20 (opción IP54)
- Capacidad de memoria: 64 MB de RAM (min.)
- Memoria de almacenamiento: 64 MB (min.) Flash Disk
- Sistema / Lenguaje de programación
- VAL 3 (lenguaje multitarea interpretado)
- Lenguaje PLC-IEC 61131-3
- Comunicación: Enlace serie RS232 / 422 - Servidor Ethernet Modbus
- Entradas / salidas (E / S): 1 o 2 tarjetas 16/16 entradas / salidas digitales, opcional
- Bus de campo: DeviceNet, Profibus, CANopen, ModBus
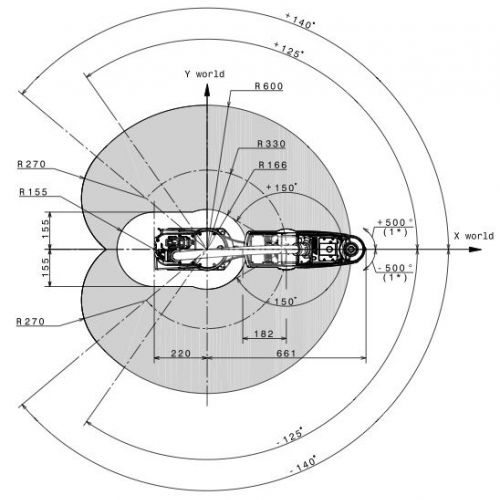
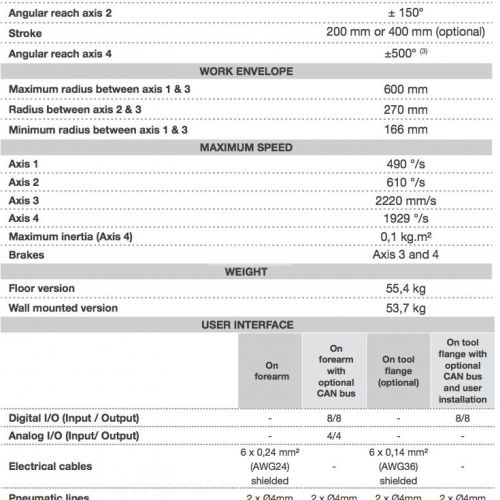
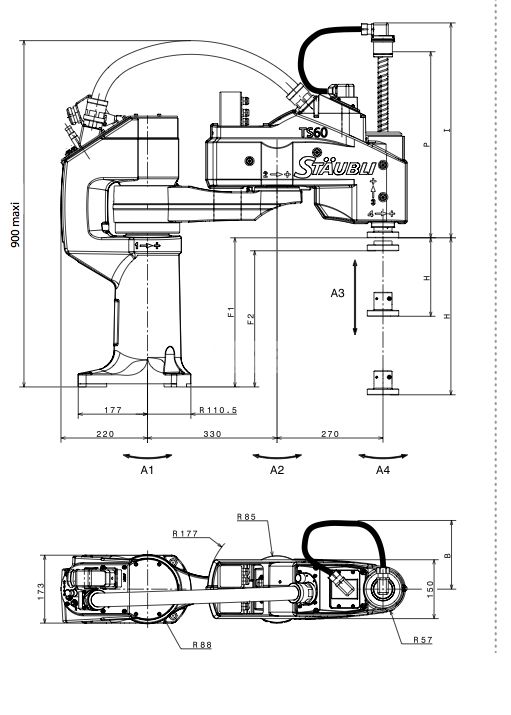
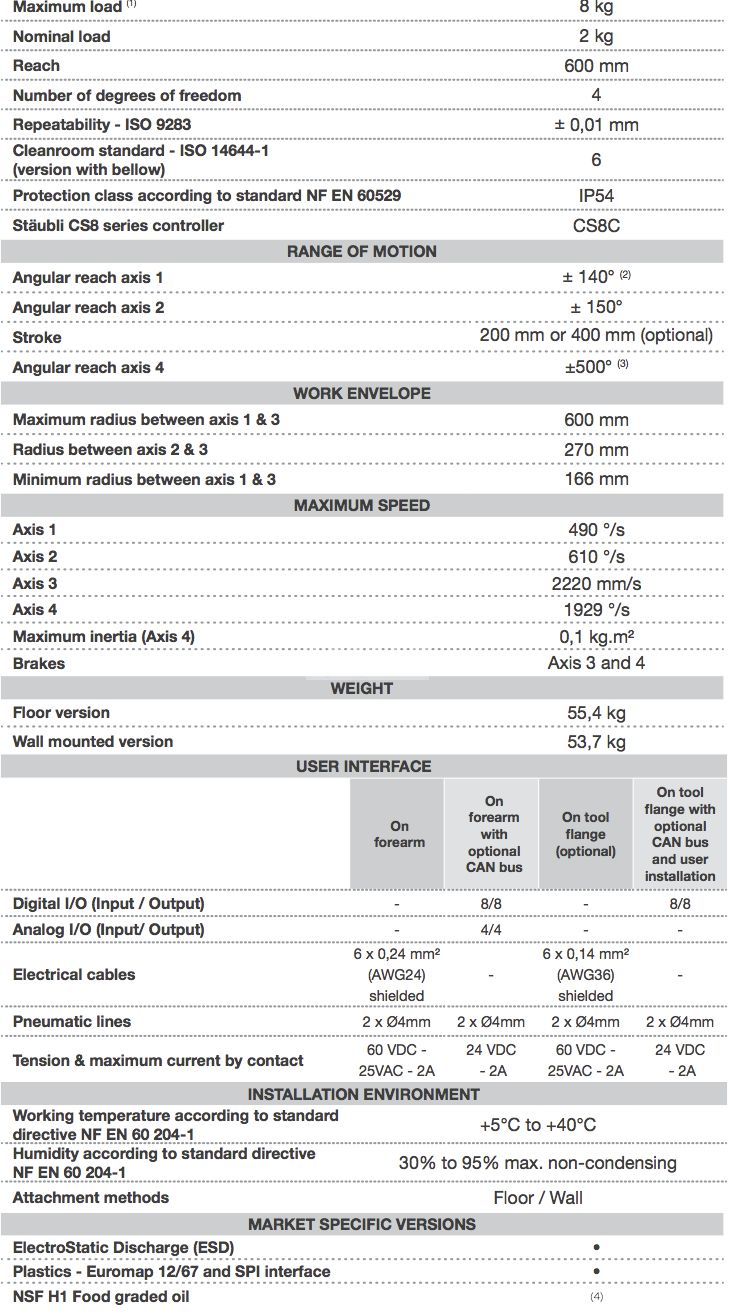
Especificaciones principales
- Carga Máxima del Robot: 2 Kg.
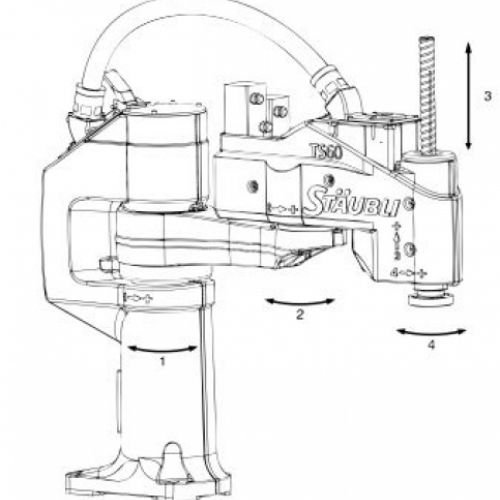
- Número de ejes: 4
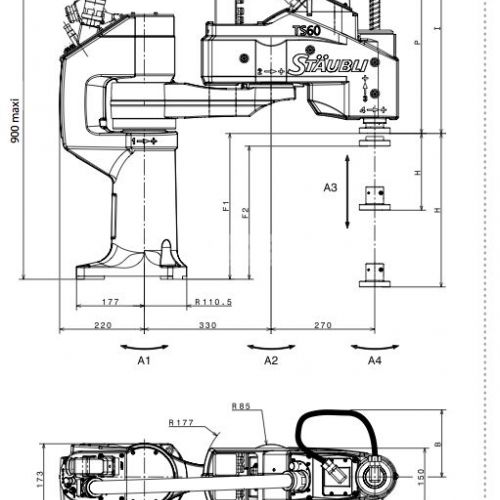
- Máximo alcance horizontal: 600 mm.
- Eje Z arriba / abajo de carrera: 200 mm
- Repetibilidad: 0,01 mm.
- Controlador: CS8C
Velocidad de movimiento del robot
- J1: 490 º / s
- J2: 610 º / s
- J3: 2.220 mm / s
- J4: 1.929 º / s
Aplicaciones de robots
- Carga y descarga
- Montaje de piezas





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}